超声波传感器
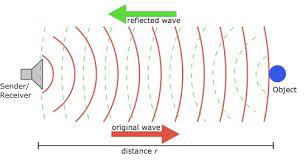
超声波传感器是一种使用声波测量物体距离的设备。它的工作原理是发出超声波,并等待它从物体反射回来,测量从发射超声波到接收到超声波的时间差\(\Delta t\),然后根据声波在空气中的传输速度计算距离。 $$ d=v\times \Delta t/2 $$ 我们将距离公式除以2,因为声波沿着往返行进,即从传感器返回传感器,使实际距离加倍。
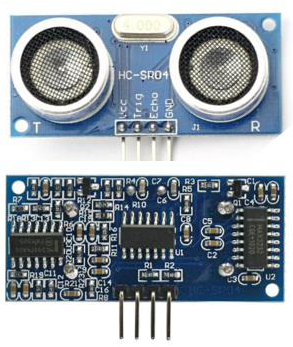
HC-SR04超声波传感器提供了非常好的非接触范围检测,准确度高,读数稳定,易于使用,测量范围大致从2cm到400cm。
其操作不受阳光或黑色材料的影响,尽管在声学上,柔软的材料(如布料等)可能难以检测到。它配有超声波发射器和接收器模块。
技术规格
- 工作电压:5V DC
- 工作电流:15mA
- 静态电流:<2mA
- 测量角度:<15°
- 测距:2cm – 4m
- 分辨率:0.3厘米
使用说明
HC-SR04上有四个针脚。他们是 :
- Vcc(5V电源)
- Gnd(地面)
- Trig(触发器)
- 回声(接收)
Trigger 和 Echo 分别接到控制板的两个数字引脚。
- 将Trig引脚设置为高电平,至少10us,触发模块测距功能。
-
触发等待约200us后,模块会自动发送 8 个 40KHz 的超声波脉冲。
-
脉冲发送完成后,Echo 引脚立即输出高电平。
- 当模块检测到返回的完整的8个40KHz 的超声波脉冲后,Echo 引脚变为低电平。这步会由模块内部自动完成。
- 因此,Echo 引脚高电平持续的时间就是超声波从发射到返回的时间。使用 pulseIn() 函数获计算Echo高电平持续的时间,乘以声波在空气中的传播速度,就可以计算出这段超声波脉冲从发射到接收经历的距离。

Arduino代码
/*
* Ultrasonic Sensor HC-SR04 interfacing with Arduino.
*/
// defining the pins
const int trigPin = 9;
const int echoPin = 10;
// defining variables
long duration;
int distance;
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); // Starts the serial communication
}
void loop() {
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// 开始发射声波,Echo端计时开始
duration = pulseIn(echoPin, HIGH);
// Calculating the distance, mm
distance= duration*0.034/2;
// Prints the distance on the Serial Monitor
Serial.print("Distance: ");
Serial.println(distance);
}
代码说明
Arduino中,提供了一个函数pulseIn()。
pulseIn()函数用来读取一个引脚的电平持续时间(HIGH或LOW)。例如,如果value是HIGH,pulseIn()会等待引脚变为HIGH,开始计时,再等待引脚变为LOW并停止计时。返回脉冲的长度,单位毫秒。如果在指定的时间内无脉冲函数返回。
计时范围从10微秒至3分钟。(1秒=1000毫秒=1000000微秒)
超声波测距的使用限制
从前面介绍的超声波测距原理容易理解这种测距方式有其弊端或不适用的场合。
- 测量结果受空气环境影响。声波在空气中的传播速度采用340m/s只是近似值,空气温湿度,密度的改变都会导致声波传输速度的变化。而代码中假设声波速度始终为340。甚至,在太空中没有空气,声波无法传播,所以这种测量方式就无法使用了。
- 测量角度。如果被测对象与发出声波的方向平行,无法形成有效反射,echo端接收不到反射信号,也无法准确测量。
- 测量对象吸收声波。如果被测对象比较柔软,像泡棉,绒娃娃,他们会吸收声波,不能有效地反射声波。所以这种情况下也无法测量。